Ako prebieha navigácia sondy na Marse?
Ako sa pohybuje sonda po povrchu Marsu a ako prebieha jej navigácia?

Sonda MER Opportunity pri okraji krátera Victoria na Marse. Tento obrázok je vizualizácia – samotná sonda bola digitálne vložená do skutočnej fotografie z Marsu, pretože takto by ju nemal “kto” na Marse odfotiť. Kredit obrázka: NASA/JPL-Caltech.
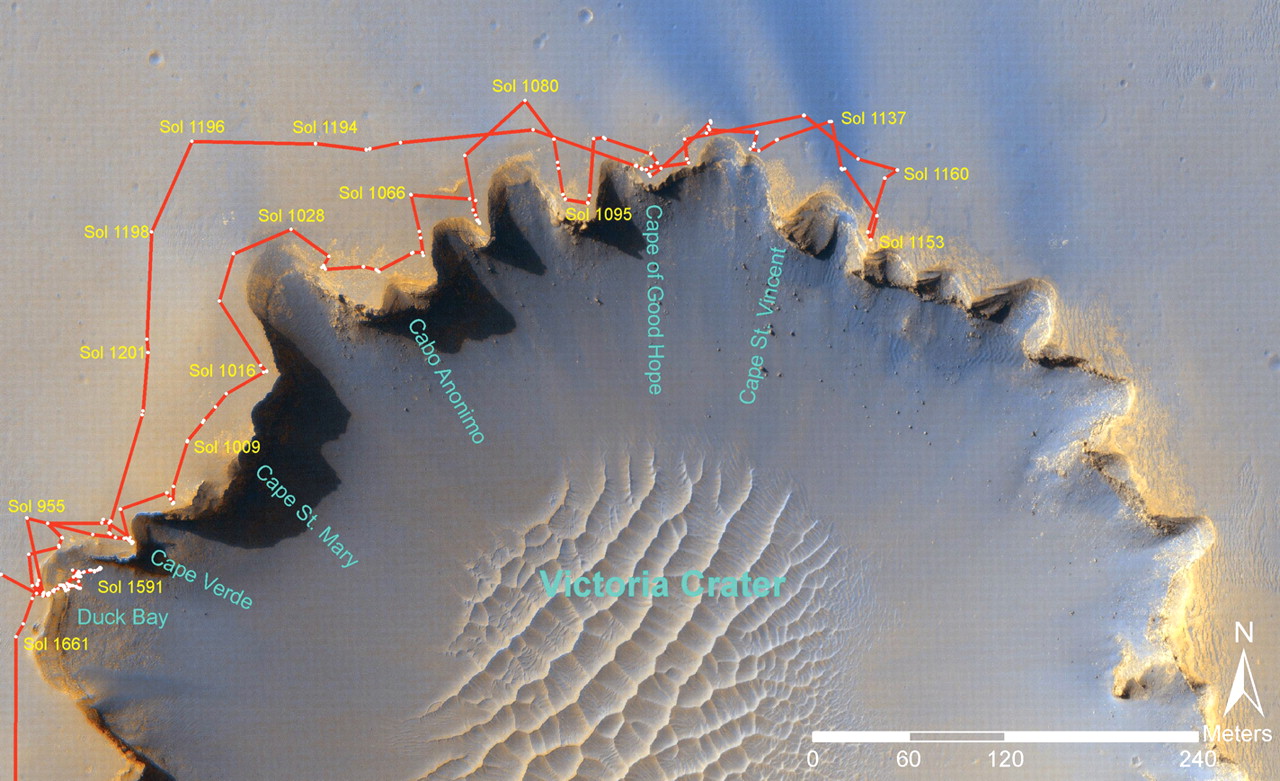
Snímka kráteru Victoria na Marse z obežnej dráhy orbitálnej sondy MRO. Červenou je zakreslený pohyb sondy po okraji krátera v jednotlivých marťanských dňoch misie (Sol). Kredit obrázka: NASA/JPL-Caltech; Processing: [1].
Takto sa to naozaj nedá. A čo takto riadiť sondu pomocou televíznych kamier, ako to prebiehalo kedysi pri ovládaní slávnych Lunochodov na Mesiaci? Sklamem vás, ani toto nepomôže. Pretože ak vyšlete signál sonde na Mesiaci, aby sa otočila “doprava”, tak ona ten signál dostane za cca 1,2 sekundy a potvrdzujúci signál sa vám vráti do riadiaceho centra po vykonaní manévru + cca 1,2 sekundy. Samozrejme za predpokladu, že sonda pracuje na privrátenej strane Mesiaca k Zemi. Takže s Mesiacom sa to celkom dá. Ale s planétou Mars je to trochu “divočina”.
Mars je planéta, ktorá sa pohybuje na orbite okolo Slnka, rovnako ako Zem. Samozrejme je na inej orbite, na vzdialenejšej ako Zem (smerom od Slnka). Zem a Mars sa trvale nenachádzajú v jednej priamej vzdialenosti, čiže ich vzájomná vzdialenosť sa stále mení. Neznamená to však, že sa mení nejak “radikálne” v priebehu minút, ale tento rozdiel je badateľný už v priebehu dní. Okrem toho, ak prevádzkujeme povrchovú sondu, táto sa nachádza na nejakom mieste na Marse, ale jej “viditeľnosť” zo Zeme nikdy nie je trvalá, pretože planéta Mars rotuje, rovnako ako naša Zem. Už ste dosť dopletení? Nebojte, ešte to domotáme trochu viac. Aby toho teda ešte nebolo málo, obežné dráhy Marsu a aj Zeme okolo Slnka nie sú presné kružnice, ale elipsy, čiže vzdialenosti a vzájomné polohy oboch planét sú síce periodicky vždy presne predikovateľné – teda “predpovedateľné” – ale už len z týchto faktov si viete asi predstaviť, že to nebude asi až tak jednoduché.
Okej, takže vieme ako je to s pohybom a vzájomnou polohou Zeme a Marsu. Z týchto faktov teda vieme určiť, že samotný rádiový signál vyslaný smerom zo Zeme k Marsu bude cestovať 5 až 22 minút. Podľa toho, aká je teda vzdialenosť Marsu od Zeme. Pre jednoduchý príklad je zvykom používať priemernú dobu “cesty” rádiového signálu zo Zeme k Marsu a to okolo 13 minút. Je to naozaj len “pre príklad” a pre maximálne zjednodušenie k vysvetleniu problematiky. Čiže, 13 min smerom zo Zeme (z riadiaceho strediska) k Marsu + čas potrebný na to, aby sonda pochopila čo od nej chceme a aby ten manéver začala vykonávať + 13 min smerom z Marsu k Zemi (do riadiaceho strediska, aby sme vedeli, že manéver teda vykonáva). No a sme doma. My si myslíme, že “super, sonda ide doprava”, ale sonda medzitým uviazla, alebo sa prevrátila (vyberte si). Koniec misie… Rýchlo vymyslime výhovorku pre médiá (daňových poplatníkov). To by bol trochu “prúser”, čo poviete?
Takto to teda fungovať v prípade Marsu nemôže a ani nefunguje. Pohyb sondy a jej trasa po povrchu sa programuje vopred, využíva sa komplexný systém pre navigáciu a orientáciu a všetko sa detailne kontroluje. V niektorých prípadoch sa naozaj využíva systém povelov zo Zeme a to najmä v prípade existencie extrémneho rizika – napríklad prieskum veľmi blízkej terénnej prekážky. Zjednodušene popísané asi takto – samotná sonda sa pohybuje veľmi pomaly (ano, veľmi netrpezlivého človeka ide aj poraziť, keď to sleduje), čiže dajme tomu 5 min na obídenie nejakej prekážky. Spočítajme si teda dobu prijatia signálu sondou, samotný manéver sondy a dobu prijatia signálu na Zemi a máme 31 minút dokopy. Tento popis je veľmi zjednodušený. Nebudem tu uvádzať ďalšie faktory, ktoré tento proces časovo “natiahnu” – doba dátového spracovania na Zemi, odoslanie povelu rádiovou sieťou na Zemi do najvhodnejšej antény na Zemi (Deep Space Network, o tom niekedy nabudúce) a pomocou nej vysielanie smerom k Marsu, rôzne rušenie, vplyvy ionosféry Marsu, Zeme, atď. Takýmto spôsobom sa však raz podarilo zachrániť sondu (rover) MER Opportunity, keď sa jej podarilo uviaznuť v sypkom teréne. Vtedy však nebola iná možnosť, buď by zostala sonda uviaznutá, alebo by sa to “skúsilo” a podarilo sa.
Ako však prebieha navigácia a pohyb oveľa väčších sond (roverov)? Keď si porovnáme MER Opportunity (prípadne jej dvojičku MER Spirit) s MSL Curiosity, alebo Mars 2020 Perseverance, tak ako prvé nás napadne, že pokiaľ dokáže “uviaznuť” Opportunity, ktorej veľkosť je asi ako veľký kus nábytku, tak ako dopadne taká Curiosity, alebo Perseverance, ktoré sú veľké ako osobné auto? Áno, riziko pri pohybe sondy s hmotnosťou skoro 1 tonu v neprebádanom teréne plnom nástrah, asi bude dosť vysoké. Nehovoriac o celkovej cene takejto sondy a o vedeckej hodnote takejto misie.

Porovnanie veľkosti sond (zľava doprava): Opportunity/Spirit, Sojourner, Curiosity/Perseverance. Pre lepšiu predstavu, Curiosity (úplne vpravo) je vysoká cca 2,2 m, dlhá 3 m a široká 2,7 m (asi ako osobné auto). Kredit obrázka: NASA/JPL-Caltech.
Práve z týchto dôvodov, je pri týchto typoch mobilných sond aplikovaný komplexný navigačný systém s umelou inteligenciou. Tento systém využíva nielen prvky inerciálnej navigácie, komplexné dáta zosnímaného terénu okolia, ale samostatný navigačný systém založený na umelej inteligencii (AutoNav). Ako ilustrácia výborne poslúži animácia nižšie:
Táto počítačová animácia zobrazuje napríklad záznam telemetrie zo sondy Perseverance (NASA), pri prvom využití systému AutoNav – funkcie automatickej navigácie, ktorá umožňuje sonde vyhnúť sa napríklad skalám a iným prekážkam bez zásahu riadiaceho centra zo Zeme. Na uvedenej animácii je pohyb sondy Perseverance zrýchlený až 50-krát, v skutočnosti prešla sonda Perseverance trasu len 31 m a trvalo jej to 45 minút.
Samotný terén je vytvorený z výškových máp a presne podľa týchto máp sa sonda pohybuje v okolitom teréne. Detailná digitálna mapa sa vytvára postupne zo stereo snímok získaných z navigačných kamier sondy. Systém automatickej navigácie používa výškovú mapu na vyhodnotenie možných trás a to najmä z pohľadu bezpečnosti. Trajektórie sú znázornené oblúkmi vychádzajúcimi z prednej časti sondy. Rôznofarebné oblúky označujú rôzne výsledky hodnotenia nebezpečnosti:
- Modrá – znázorňuje trasu, kde terén môže spôsobiť pokles kolies podvozku (sonda môže “zapadnúť”).
- Ružová – znázorňuje trasu, kde terén z hľadiska jeho výšky môže spôsobiť riziko uviaznutia sondy tým, že dôjde ku kontaktu terénu so spodnou časťou sondy.
- Žltá – znázorňuje neznámy terén.
- Biela – skutočná trasa, ktorú systém vyhodnotil ako bezpečnú.
Zatiaľ nerealizované projekty, resp. určovanie polohy na Marse v budúcnosti
Na tomto mieste ešte pre úplnosť spomeniem systém, ktorý dobre poznáme z našich pozemských podmienok. Ide o satelitnú navigáciu, prípadne bežne nazývaný “GPS”, aj keď dostupných systémov satelitného určovania polohy na Zemi je momentálne už viac (samotný GPS je len jedným z nich, je to americký systém “Global Positioning System” – NAVSTAR/GPS). Ako je to však v prípade využitia takýchto systémov na inej planéte, ako u nás doma na Zemi? Je to dobrá otázka, na ktorú ešte nie je úplná odpoveď. V rokoch 2012-2017, ešte kým som pôsobil v Košiciach, som pracoval na projekte prvého konceptu satelitného navigačného systému pre Mars a v rámci výskumu planetárnych podmienok sme s kolegami narazili na mnoho faktorov, ktoré by mali na prevádzku takéhoto systému určitý vplyv, ale aplikácia samotného systému v prevádzke by bola na základe celkových výsledkov výskumu možná a realizovateľná.
Samotný výskum satelitného systému pre určovanie polohy na Marse je komplexným projektom, pozostávajúcim z menších sub-projektov, na ktoré je nevyhnutné sa zamerať a venovať im detailnú pozornosť – a na to je nevyhnutný čas a vhodné podmienky. V súčasnosti narastá záujem o výskum Marsu robotickými prostriedkami a na Marse a v jeho okolí začína byť pomerne “rušno”. Systém satelitného určovania polohy má nesporné výhody. Nebudem ich tu menovať, pretože ich je naozaj veľa. Jednou, pre vedeckú komunitu asi najdôležitejšou, je určite radikálne zníženie rôznych rizík a tým aj nižšia celková cena mnohých robotických misií. Tento príspevok však nemá za cieľ propagovať jeden z projektov, na ktorých figurujem, len je vhodné spomenúť aj systém satelitného určovania polohy na Marse, pretože logicky sa táto otázka dostáva na svetlo pri každej novej plánovanej misii na Mars.
Budú nakoniec potrební ľudia na kontrolu pohybu robotických sond na Marse?
Samozrejme samotný pohyb sondy po povrchu Marsu nie je v žiadnom prípade jednoduchý. Aj napriek aplikácie komplexných technológií a procesov, je nevyhnutná podrobná kontrola pohybu sondy, výpočet predikcií a ich analýza ešte predtým, ako dôjde k diaľkovému nahratiu akýchkoľvek naprogramovaných pokynov do palubného počítača sondy. Pretože aj napriek iným robotickým “obyvateľom” Marsu, s určitoťou vieme zaručiť, že žiadny z týchto obyvateľov na mieste pomôcť (zatiaľ) nedokáže.
~Jozef
Tip:
[EN] English version of this article you can read here.
Tento článok nájdete publikovaný aj na webe denníka SME, v sekcii blog.
Referencie:
[1] Squyres et al.: Exploration of Victoria Crater by the Mars Rover Opportunity; Science; Vol 324, Issue 5930; 22 May 2009; pp. 1058-1061; DOI: 10.1126/science.1170355; Link.






